| セミナーカテゴリを お選びください 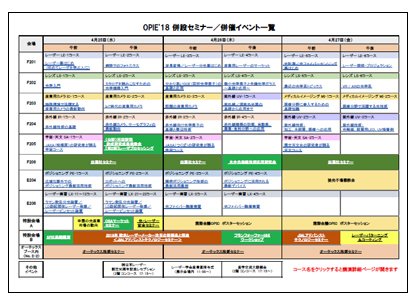 併設セミナー/併催イベント一覧 画像をクリックするとPDFが開きます セミナー一覧/申込ページへ戻る |
-ポジショニング
ドローンの利活用とポジショニング技術
準天頂衛星「みちびき」を利用した機械除雪支援システムおよび衛星リモートセンシングとAISを利用した船舶航行監視支援システム
準天頂衛星「みちびき」から取得できる機械除雪作業の高精度リアルタイム精密位置情報と道路施設の精密3次元地図情報をリアルタイム処理して、除雪作業の安全性と効率化を図るための機械除雪支援システム(試行)の開発を行いました。独自のシステム開発による開発・運用・管理・更新に至る首尾一貫した機械除雪業務のためのワンストップサービスを目指しています。
本システムでは、車載写真レーザ測量より取得された精密3次元地図情報と施設識別情報から構成される精密3次元道路施設情報(平面精度:1cm、高さ精度:2cm)ならびに準天頂衛星「みちびき」から送信される除雪車のリアルタイム精密3次元位置情報(移動体平面精度:12cm、移動体高さ精度:24cm)をリアルタイム処理可能なPCシステムとして除雪車に実装(時速50km走行に対応)できるように設計しています。
除雪車に搭載したPC画面上で、雪に覆われた道路施設を事前に検知して、接近距離の程度により警告音と画面表示処理を行い、高速リアルタイム2次元・3次元動画として同時に確認でき、オペレーターによる除雪作業の安全性の確保と効率化を支援することが可能です。
海域における移動体ポジショニング
地球観測衛星(合成開口レーダ、光学系)データとAIS(自動船舶識別システム)データとの統合化により船舶航行監視支援システムの開発を行いました。全天候型の合成開口レーダおよび高分解能光学系衛星データの特性およびAISの静的・動的データ特性を利用して広範囲な海域における船舶検出により航行監視を支援することが可能です。

光ファイバセンサによる広域モニタリング -災害防止、災害予測-
本講演では、分布型光ファイバセンサを活用した広域型防災センシング(予防保全)について、異常点の位置検出技術を含めて紹介する。

移動ロボットの自己位置推定と2D/3D地図構築
本講演では、移動ロボットを対象に2次元/3次元地図構築と自己位置推定(以下、SLAM)に関する基本的な理論を説明した後、様々な応用事例について紹介する。まず、SLAMに関する基本的な考え方、点群情報から生成されるグリッドマッピングとトポロジカルマッピングに関する基礎理論を説明する。次に、2次元/3次元測域センサを用いたSLAMに関する方法論を説明する。また、具体的な実装例として、RGB-Dセンサを用いた3次元地図構築の方法論について紹介し、SLAMに関する課題を様々な観点から考察し、進化計算手法を用いた高速化と高精度化に関する実用的な方法論を紹介する。
後半は、応用事例として、生成された地図を用いた経路計画や遠隔操作に関する研究の他、複数の2次元測域センサを統合した測域センサアレイによる自己位置推定手法、時々刻々と変化する3次元環境内においてトポロジカルマッピングを適応的に行う手法などに関する方法論を紹介する。

産業用ロボットにおけるモーション制御技術の適用事例
本講演では、まず、これらのロボット用途のイメージ、要求されている性能や機能、更にはその実現に必要な技術を説明します。
次に、必要な技術の中で適用しているモーション制御技術として、軌跡精度を改善するための非干渉化制御技術、動作中にリアルタイムでアームと周囲環境との干渉を回避する技術について、技術詳細を紹介します。

屋外環境での移動ロボットの自己位置推定と地図構築例の紹介
本講演では、特にこれらの自律移動ロボットで基本となる、自己位置推定と地図構築に焦点を当て、実際の移動ロボットで使われている事例を紹介する。
具体的な内容としては、SLAM: Simultaneous Localization and Mappingを用い環境情報をパーティクルフィルタなど確率的手法で融合し、自己位置推定と地図構築を同時に行う相対的位置計測法の活用事例を紹介する。また最近、自動運転分野でも期待され脚光を浴びつつあるRTK-GNSSを用いた絶対的位置計測法の活用事例についても紹介する。また、これらを実装する上で重要な働きを担っているROS(Robot Operating System)やMATLABの活用事例について述べる。

工作機械:超精密加工機を例として
12軸自動調芯ユニット、顕微鏡ステージ、レーザトラップによるマイクロマニピュレーションなど
E型コアを用いた超精密&大推力リニアモータ
2. 磁気吸引力を相殺したリニアモータの特徴
3. 超精密位置決めと大推力を実現した成功事例
一般的なリニアモータは、回転モータを切り開いて平面に展開した構造となっているため、電磁石と永久磁石の間には大きな磁気吸引力が発生し支持機構にも大きな力がかかり精密位置決め装置には問題点が多かった。
ここで、E型コアを用いて磁気吸引力を相殺した新しい発想のリニアモータを考案し、空気や油の圧力を利用する高価な支持機構を用いることなく、リニアボールベアリングとのシンプルな組合せで、 安価で簡単な構造のナノメートルクラスの超精密位置決め装置の開発に成功し、商品として販売している。
今後、次世代半導体製造装置、光学関連検査装置、バイオ関連装置などの超精密位置決め装置、自動化装置としての応用が期待される。

圧電アクチュエータを用いた精密位置決め装置とその応用
精密ポジショニングのための機構および機械システムの設計
リニアモータの基礎技術と最新応用
本稿では、下記の技術動向について述べる。
(1)応用分野と特徴
(2)機種とその特徴
(3)最新応用
位置センサ(工業用測長器における種類と特徴及び現在の技術的取り組み)
本講演ではこれらの種類と特徴を紹介し、各工業用測長器の問題点と現在の解決手法を報告する。更に高分解能の要求が高まる中、それに対しどのように信頼性を担保しているか弊社の技術的取り組みの一部紹介する。



セミナー申込手順
※有料セミナー キャンセル規程:
お客様のご都合による受講解約の場合、3/26までは受講料の50%、3/27以降につきましては受講料の全額を解約金として申し受けます。
※学生料金:
個人もしくは学校からのお支払いで、30歳未満の方が対象となります。
鈴木 真二
東京大学
大学院工学系研究科 教授
1979年東京大学大学院工学系研究科修士課程修了。豊田中央研究所を経て、86年東京大学工学部助教授。96年より同教授。工学博士。日本航空宇宙学会会長(第43期)、日本機械学会副会長、国際航空科学連盟理事、日本UAS産業振興協議会(JUIDA)理事長、日本無人機運行管理コンソーシアム(JUTM)代表など。
菅 雄三
広島工業大学
環境学部 地球環境学科 教授、工学博士
1975年 広島工業大学工学部卒業
1978年 法政大学大学院工学研究科修了
1978年(財)リモートセンシング技術センター
1979年 広島工業大学(現在に至る)
2016年(公社)日本測量協会中国支部支部長
2017年(一社)日本リモートセンシング学会中国四国支部副支部長
2017年(独)宇宙航空研究開発機構 大規模災害衛星画像解析支援チーム
足立 正二
横河電機(株)
1981年信州大学大学院工学研究科電子工学専攻修了.同年安藤電気(株)入社.
光通信用計測機器、次世代光通信用測定技術、光ファイバセンシング、光ファイバレーザの研究開発に従事.
2004年茨城大学大学院理工学研究科博士後期課程 情報・システム科学専攻修了,博士(工学) .
2004年横河電機(株)へ転籍.現在は、光ファイバセンシング技術のプラント計装への適用開発に従事している.
2015年11月よりNPO法人光ファイバセンシング振興協会 副理事長・事務局長
久保田 直行
首都大学東京
システムデザイン学部 教授
1997年名古屋大学大学院工学研究科博士後期課程修了。博士(工学)。大阪工業大学、福井大学、東京都立大学を経て、2005年首都大学東京システムデザイン学部准教授、2012年同教授、現在に至る。2002年から2008年まで科学技術振興機構研究員兼任。英国ポーツマス大学、韓国ソウル国立大学客員教授他、主に計算知能やロボットパートナーに関する研究などに従事。
神谷 陽介
(株)安川電機
技術開発本部 開発研究所 ロボティクス技術部 次世代ロボット制御課 課長代理
2006年名古屋大学大学院工学研究科マイクロ・ナノシステム工学専攻博士前期課程修了
同年株式会社安川電機入社
現在、産業用ロボットの制御に関する研究開発に従事
小林 一行
法政大学
理工学部創生科学科 教授
法政大学 工学部 電気工学科計測制御 1989
法政大学 工学研究科 システム工学 博士後期 1994
アメリカ合衆国ミシガン州立オークランド大学 客員研究員 1994/04/01-1996/03/31
法政大学工学部システム工学科 専任講師 1996/04/01-2000/03/31
法政大学工学部システム工学科 助教授 2000/04/01-2007/03/31
法政大学工学部システム制御工学科 准教授 2007/04/01-2009/03/31
法政大学工学部システム制御工学科 教授 2009/04/01-2010/04/30
法政大学理工学部 教授 2010/05/01-2011/03/31
法政大学理工学部 創生科学科 教授 2011/04/01-現在
●研究分野
システム工学
計測制御工学
金 弘中
(株)KOVERY
代表取締役
1987.3 韓国朝鮮大学校 工科大学電気工学科 入学
1991.2 韓国朝鮮大学校 工科大学電気工学科 卒業
1992.4 東京都市大学大学院工学部電気工学専攻修士課程入学1997.3 東京都市大学大学院工学部同課程修了(工学博士)
1997.4 株式会社 日立製作所 入社
日立研究所に配属、モータ関連研究開発に従事
2009.8 一身上の都合により退社
2010.3 KOVERY Co., Ltd. 設立 代表理事
現在に至る。
水野 勉
信州大学
工学部 電子情報システム工学科 教授
1958年6月17日生。1983年3月信州大学大学院工学研究科電気工学専攻修士課程 修了。同年4月(株)アマダ入社。1996年4月信州大学工学部電気工学科助手、1999年4月同助教授、2011年4月同教授、現在に至る。工学博士。リニアモータ・リニアアクチュ エータ、電磁センサ、高周波電磁デバイスの研究・教育に従事。電気学会、IEEE、日本磁気学会、日本AEM学会などの会員。
吉田 昌春
(株)マグネスケール
マグネスケール事業本部 事業戦略企画室 室長
芝浦工業大学大学院 修士課程修了
1983年 ソニーマグネスケール株式会社入社 営業部配属
2010年 会社名 株式会社マグネスケールとなる
2015年 マグネスケール事業本部 事業戦略企画室 室長(現在)